步进电机作为履行元件,是机电一体化的要害产品之一,大范围的应用在各种自动化设备中。步进
电机和一般电动机不同之处在于它是一种将电脉冲信号转化为角位移的履行机构,它一起完结两个
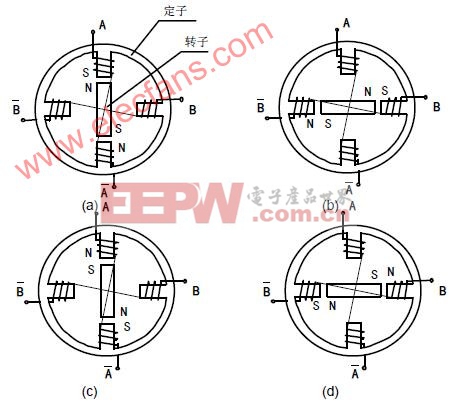
电机作业原理:图 2.1 为两相步进电机的作业原理示意图,它有2 个绕组。当一个绕组通电后,其定子磁极发生磁场, 将转子吸合到此磁极处。若绕组在操控脉冲的效果下, 通电方向次序依照


一次,使电机滚动一步,即90 度。4 个脉冲,电机滚动一圈。脉冲频率越高,电机滚动越快,实
步进电机的输出力矩与电机的有用体积、线圈匝数、磁通量、电流成正比,因而,电机有用体
对应一个脉冲信号,电机转子转过的角位移。一般二相电机的步距角为 1.8 度,即电机运动
是指步进电机通以额定电流但没有滚动时,定子锁住转子的力矩。它是步进电机最重要的参数
步进电机每转过一个步距角的实践值与理论值的差错。用百分比表明:(差错/步距角)´ 100%。
电机在某种驱动方式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
电机在某种测验条件下测得运转中输出力矩与脉冲频率联系的曲线称为电机矩频特性,这是电
机许多动态曲线中最重要的,也是电机挑选的底子根据。如图2.2 所示,在低速时的电机力矩挨近
电机的动态力矩取决于电机运转时的相电流在额定电流和电压下,相电流越大,电机输出力矩
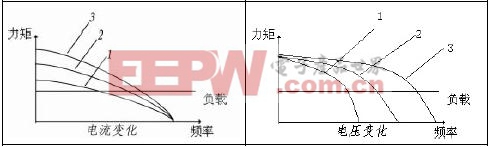
图2.2 电机矩频特性曲线 表明电压或电流的值变大时,力矩的改变趋势。别的,请注意,同一电机
步进电机均有相对固定的共振区域,2、4 相混合式步进电机的共振区一般在180~250pps 之间(步距角1.8 度)。电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向
上偏移。为使电机输出力矩大,不失步及使体系的噪音下降,一般作业点均应偏移共振区较多。注
操控器给电机发了 n 个脉冲,步进电机并没有滚动n 个步距角。一般当电机力矩偏小、加速度
步进电机包含反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。
永磁式步进电机一般为两相,转矩和体积较小,步进角一般为 7.5 度或15 度;
反应式步进电机一般为三相,可完成大转矩输出,步进角一般为 1.5 度,但噪声和振荡都很大。
反应式步进电机的转子磁路由软磁资料制造成,定子上有多相励磁绕组,使用磁导的改变发生转矩;
混合式步进电机是指归纳了永磁式和反应式的长处而规划的步进电机。它又分为两相和五相:
两相步进角一般为1.8 度,而五相步进角一般为0.72 度。现在,两相混合式步进电机最常用。
步进电机分双极性电机和单极性电机。如图 2.3(a)所示双极性电机,电流在2 个线圈活动
时序为AA ® BB ® AA ® B B ;而单极性电机线圈中电流的活动方向是固定的,如图2.3
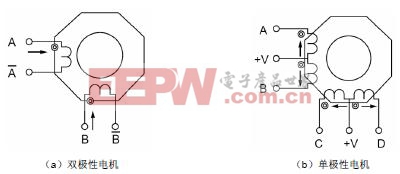
许多 2 相步进电机有8 根引线,这种电机既能够串联衔接又能够并联衔接。
串联衔接的电机,电流较小,低频力矩较大;并联衔接的电机,电感较小,所以发动、中止速
