步进电机是怎么作业的?
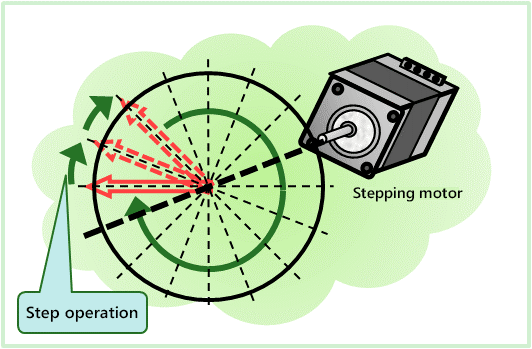
步进电机作为能逐渐驱动至指定旋转视点的电机,其最根本的作业便是步进的操作,即步进电机经过转子在必定视点重复运动的方法来进行旋转。该视点称为步距角,是步进电机的驱动单元。步进电机依据相同的步距角进行旋转,就像人们一步步上下楼梯相同。图1展现了步进电机最根本的作业原理示意图。
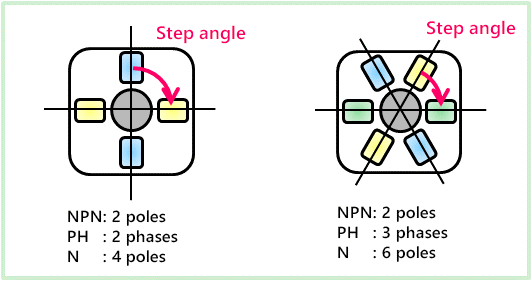
步距角是步进电机运动的根底。步距角取决于电机上的磁极总数。步距角的计算公式如下所示:
电机类型一般称为“PH相/N极电机”。如图2所示,左边为2相/4极,右侧为3相/6极。若为2相4极电机,则步距角将为90度。
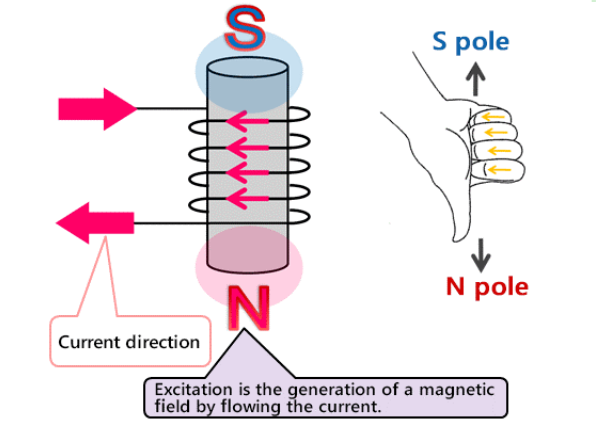
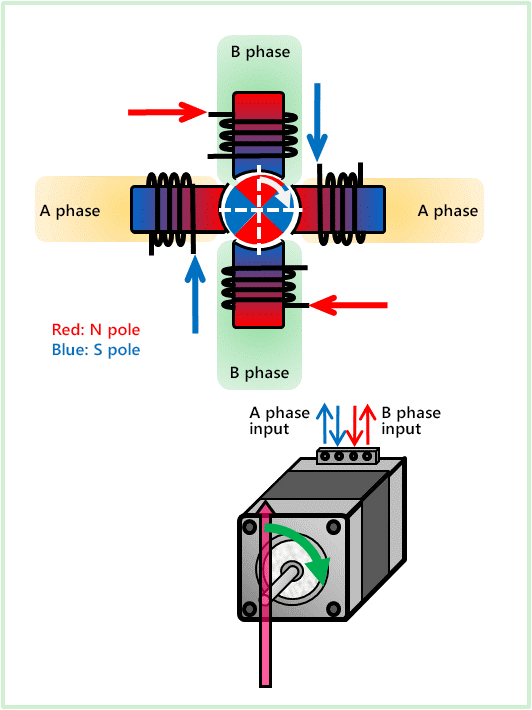
作业时,经过接连履行一切步进操作使步进电机旋转。若想了解步进具体操作,关键是要了解电流在电机定子绕组内的活动方向与定子磁极方向之间的联系。在此,咱们以双极型电机为例,来具体解释一下电流在定子绕组内的活动方向与磁极方向之间的联系。如图3所示,经过改动定子绕组中的电流方向就能改动定子磁极的方向。
接下来让咱们来了解一下电机电流和转子旋转的关联性,图4所示的是当重复切换定子绕组内的电流方向时,选用2相4极电机的定子磁极和转子运动的状况。转子经过切换定子绕组内的电流方向、转子磁极,以及各相定子的磁极排挤和吸引来进行步进操作。因而,当接连履行上述操作时,步进电机旋转。
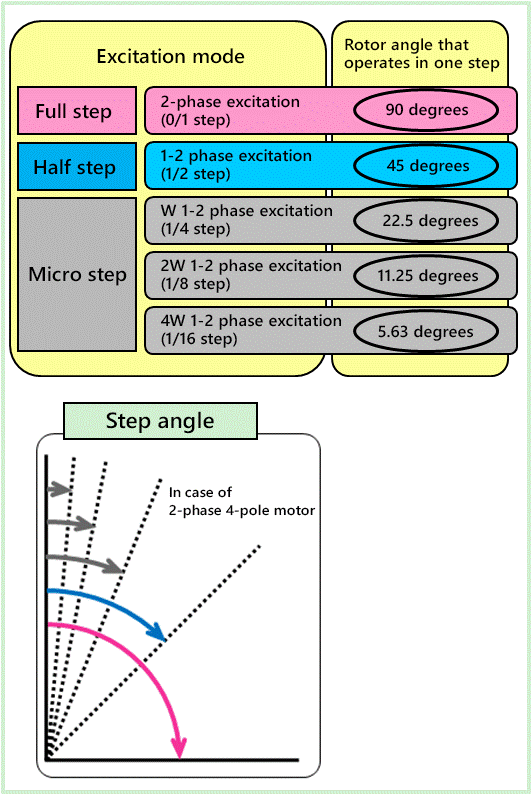
励磁方式是描绘定子磁极时最常用的术语,在操作步进电机时不同励磁方式显得很重要,励磁方式大致上能够分为全步、半步和微步三种。
以2相4极电机为例,步距角为90度。电机以全步距角(此示例中为90度)进行移动/旋转的操作方式称为全步方式。若只能将电机滚动全步距角的一半视点(此示例中为45度)。该操作方式称为半步方式。而能使用于更为精密的步进视点尺度,一般称为微步方式。在微步方式下,电机可依据全步距角的分数方式滚动,这些分数能够准确到全步距角的1/4、1/8、1/16,乃至1/32。
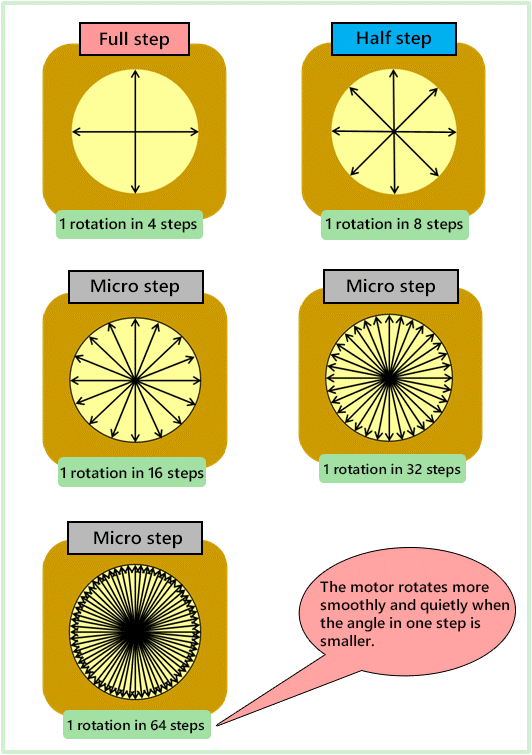
咱们结合实际使用,将励磁方式与2相4极电机单次旋转的步进数之间的联系汇总,你们能够直观的比较一下三个方式下步进电机转角的差异。
在了解了步进电机的根本作业原理之后,接下来芝识讲堂就要跟我们好好的讲一讲步进电机重要的驱动IC常识了,肯定不能错失哦!
下一篇:步进电机驱动器原理