三轴步进电机操控体系
体系在机器人、机床加工中心、全方位盯梢等体系中都有广泛的使用远景。传统眼底照相体系首要是选用手动操控来确认相机方位,本体系可完成全主动瞳孔定位。首要介绍三轴
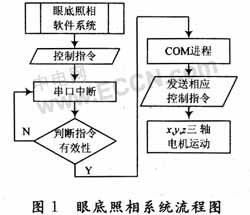
其体系作业流程:由眼底照相体系软件进行瞳孔主动定位和聚集,调用“爬山算法”确认焦距及瞳孔方位,再发送相应的操控指令给下位机,操控电机移动然后调整相机至置最佳方位,循环往复直至最佳方位。眼底照相体系流程图见图1。
二相步进电机类型:42BYGH107步进电机是一种用电脉冲信号进行驱动操控,并将电脉冲信号转换成相应的角位移或线位移的机电履行元件。
二相混合式步进电机驱动器类型:SH-2024B该类型驱动器具有作业电压规模宽、效率高,相电流、细分数可调,主动半流的特色,相电流设定从0.5~2 A,细分数设定有2,5,10,20,40共5档,可满意微步距驱动的要求。
操控板根据STC89C58RD+专用电机操控板,为本实验室开发,具有如下功用:
(3)128×64图形液晶显示、30个可修正功用键、15个LED灯指示;
(5)高速CPU,ISP串口编程,可直接经过通讯口修正软件,无需拆下电路;
(7)或许过RS 232通讯接口外接副机遥控板,削减操控板接线,进步可靠性。
体系选用RTX51TINY操作体系,共创立如下进程:初始化进程INIT,串口通讯进程COM,电机滚动进程IOCIRCLE及串口中止函数serial()。
进程INIT():串口初始化函数serial(),各参数初始化,创立COM,IOCIRCLE进程,删去本身。
串口初始化serial():判别串口得到的操控字是否有误(选用偶校验),有错直接回来,正确则唤醒进程COM()。
进程COM():判别操控字类型,更改相应寄存器的值,并调用IOCIRCLE()进程。
将传统的手控眼底照相体系改善为主动操控,完成了上位机体系的简化,上位机只需要发送相应的操控指令就可以完成对三轴步进电机的操控,此三轴步进电机体系很简单改善成多电机体系。
本体系的上位机完成遥控板操控与软件操控,软件操控若选用Java完成则可建立B/S架构,完成长途操控。